足回り作成2 (1-3.ロボット制作) [ロボット制作(tankun-mk1)]
はい、連チャンで~す![[exclamation×2]](https://blog.ss-blog.jp/_images_e/160.gif)
ちょっと会社に行く時間が迫って来た…急がねば。
次はモーターです。TAMIYAさんのダブルギアボックス。

これの凄いところは
1)モーターが2つなので左右それぞれに制御できる
2)ギアの組み合わせでトルク速度・トルクが4段階に変更可能
1)ですがロボットを旋回させる場合には必須となります。右に移動する場合は「左のキャタピラを前進」「右を後退」みたいな。
2)に関してはモーターギアの仕組みとして速度を早くするとトルク(パワー)が落ちて、速度を遅くするとパワーが上がるといった感じです。速度を早くし過ぎると制御が難しくなるので今回は、一番低速でハイパワーの344.2:1で行きます。
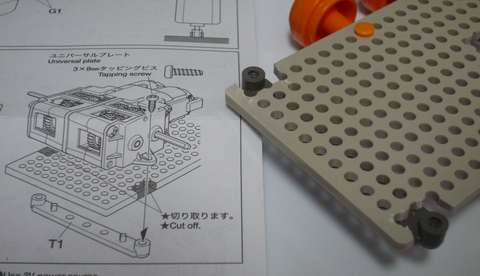
作りました~(作り方は説明書を見てね)

手前の謎の棒ですが、本体とモーターを固定するために使用します。こんな感じ![[目]](https://blog.ss-blog.jp/_images_e/84.gif)

そしてモーターを本体に取り付けて、キャタピラを装着したのがこちら

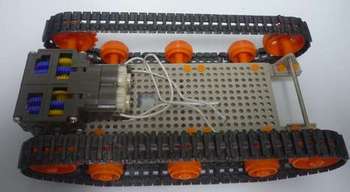
なんか動きそうな雰囲気がでてきましたねこれで足回りは一旦、完成です。
次回からはArduinoを使用した電子工作部分をやっていきたいと思いま~す。
では家族を起こして、子供を保育所に送って、会社に行ってきま~す![[わーい(嬉しい顔)]](https://blog.ss-blog.jp/_images_e/140.gif)
皆さんもいい一日を~![[手(パー)]](https://blog.ss-blog.jp/_images_e/88.gif)
ちょっと会社に行く時間が迫って来た…急がねば。
次はモーターです。TAMIYAさんのダブルギアボックス。

これの凄いところは
1)モーターが2つなので左右それぞれに制御できる
2)ギアの組み合わせでトルク速度・トルクが4段階に変更可能
1)ですがロボットを旋回させる場合には必須となります。右に移動する場合は「左のキャタピラを前進」「右を後退」みたいな。
2)に関してはモーターギアの仕組みとして速度を早くするとトルク(パワー)が落ちて、速度を遅くするとパワーが上がるといった感じです。速度を早くし過ぎると制御が難しくなるので今回は、一番低速でハイパワーの344.2:1で行きます。
作りました~(作り方は説明書を見てね)

手前の謎の棒ですが、本体とモーターを固定するために使用します。こんな感じ
そしてモーターを本体に取り付けて、キャタピラを装着したのがこちら

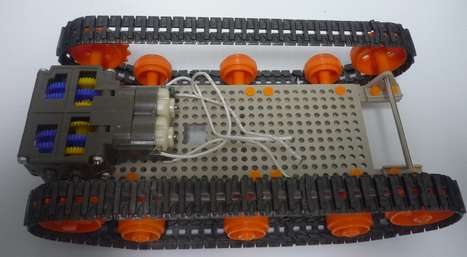
なんか動きそうな雰囲気がでてきましたねこれで足回りは一旦、完成です。
次回からはArduinoを使用した電子工作部分をやっていきたいと思いま~す。
では家族を起こして、子供を保育所に送って、会社に行ってきま~す
皆さんもいい一日を~
chihiro さん

-
nice! 11
記事 27
テーマ パソコン・インターネット
プロフィール
ブログを紹介する



コメント 0