センサー部分作成 (1-4.サーボ、センサー編) [ロボット制作(tankun-mk1)]
おはようございます。外は星が綺麗ですよぉ~![[満月]](https://blog.ss-blog.jp/_images_e/99.gif)
今日はサーボ、センサーを取り付けて行きたいと思います。アマゾンさんで購入した「超音波距離センサー + アクリル マウント アングル + サーボモーター」です。
設置する目的は以下を行うためです
1)正面に壁を見つけたら停止する
壁を見つけるために超音波センサーというパーツで前方に物体があるかを検知します。超音波センサーは超音波を前方に発信し、その反射波を受信して対象物までの距離を検出するものです。
2)右と左を確認して障害物がない方向を見つける
この右、左を確認するためには超音波センサーを右と左に回転させる必要があります。この回転を行うのがサーボモーターです。サーボモーターは上に載せた物を「90°、120°、60°」と指定した角度に回転させる事ができます。
(超音波センサー、サーボモーターの動作、配線に関しては別記事に書きますね)
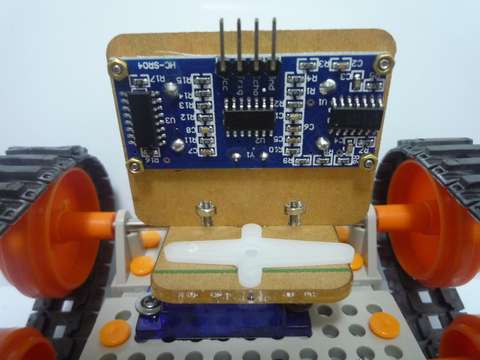
先に完成図がこちら![[exclamation×2]](https://blog.ss-blog.jp/_images_e/160.gif) ロボットに顔っぽい物がつきました
ロボットに顔っぽい物がつきました![[グッド(上向き矢印)]](https://blog.ss-blog.jp/_images_e/145.gif)

下に見える青い箱がサーボモーターです。
上に見える目みたいなものが超音波センサーです。
超音波センサーとサーボモーターをつないでいるのが、
アクリルマウントアングルです。これはプラ板・棒などで自作も可能ですが、
3点セットで1000円前後と超音波センサー(300円)とサーボモーター(450円)を
それぞれ購入した時と値段がほとんど変わりません![[るんるん]](https://blog.ss-blog.jp/_images_e/146.gif)
それでは設置方法です。
まずは写真を参考にロボットの先端部分をカットしてみます。
設置するサーボは左右非対称のパーツなので、切り取る部分も少しずらしています。

そこにサーボモーターを設置します。

センサーとアクリルマウントを設置したのがこちら![[ぴかぴか(新しい)]](https://blog.ss-blog.jp/_images_e/150.gif)
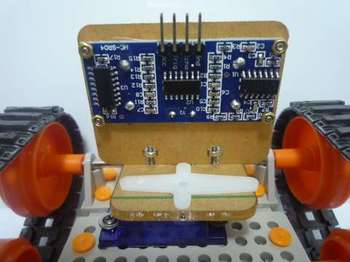
センサーとアクリルマウントを先に作ります。
白い十字架みたいなものがサーボホーンといって、サーボモーターに付属しているパーツです。
アクリルマウントの穴の部分に上からサーボホーンをはめて、
それをサーボモーターに設置すれば完成です
次回からはArduinoに各パーツを制御する方法を個別に書いていきまーす。
今日はサーボ、センサーを取り付けて行きたいと思います。アマゾンさんで購入した「超音波距離センサー + アクリル マウント アングル + サーボモーター」です。
設置する目的は以下を行うためです
1)正面に壁を見つけたら停止する
壁を見つけるために超音波センサーというパーツで前方に物体があるかを検知します。超音波センサーは超音波を前方に発信し、その反射波を受信して対象物までの距離を検出するものです。
2)右と左を確認して障害物がない方向を見つける
この右、左を確認するためには超音波センサーを右と左に回転させる必要があります。この回転を行うのがサーボモーターです。サーボモーターは上に載せた物を「90°、120°、60°」と指定した角度に回転させる事ができます。
(超音波センサー、サーボモーターの動作、配線に関しては別記事に書きますね)
先に完成図がこちら

下に見える青い箱がサーボモーターです。
上に見える目みたいなものが超音波センサーです。
超音波センサーとサーボモーターをつないでいるのが、
アクリルマウントアングルです。これはプラ板・棒などで自作も可能ですが、
3点セットで1000円前後と超音波センサー(300円)とサーボモーター(450円)を
それぞれ購入した時と値段がほとんど変わりません
それでは設置方法です。
まずは写真を参考にロボットの先端部分をカットしてみます。
設置するサーボは左右非対称のパーツなので、切り取る部分も少しずらしています。

そこにサーボモーターを設置します。

センサーとアクリルマウントを設置したのがこちら
センサーとアクリルマウントを先に作ります。
白い十字架みたいなものがサーボホーンといって、サーボモーターに付属しているパーツです。
アクリルマウントの穴の部分に上からサーボホーンをはめて、
それをサーボモーターに設置すれば完成です
次回からはArduinoに各パーツを制御する方法を個別に書いていきまーす。
chihiro さん

-
nice! 11
記事 27
テーマ パソコン・インターネット
プロフィール
ブログを紹介する



コメント 0