電子回路部分作成1 (1-5.回路:モータ、スイッチ) [ロボット制作(tankun-mk1)]
おはようございます。
試験終わった~受かるといいなぁ。
さて、更新を完全に怠っていましたが今日から再開です![[exclamation×2]](https://blog.ss-blog.jp/_images_e/160.gif)
今日からロボット作成として電子回路部分を作成していきます。
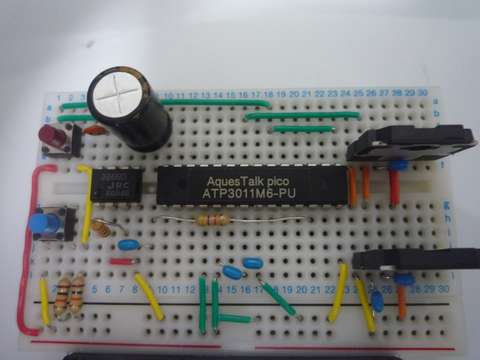
まず先に完成後の回路はこちら
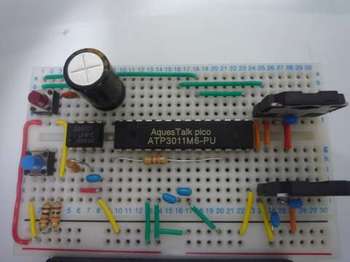
普段は赤い線(Vcc)と黒い線(GND)の部分がブレッドボードの
上下それぞれにあったと思いますが、今回は写真の通り
VccとGNDが片方にしかないタイプを使用します。
また、Vccの部分ですが左と右でわかれているので、
異なる電圧を接続可能となっており、
今回はArduinoから左側に3.3V、右側に5.0Vを接続します。
補足として、a-fの部分が電気的に繋がっていてg-lの部分が繋がっています。
つまりa-fとg-l部分は繋がっていないので別のハードを並べられます。
いきなり全部は難しいので今回は
モーター部分とスイッチ部分からいきますね
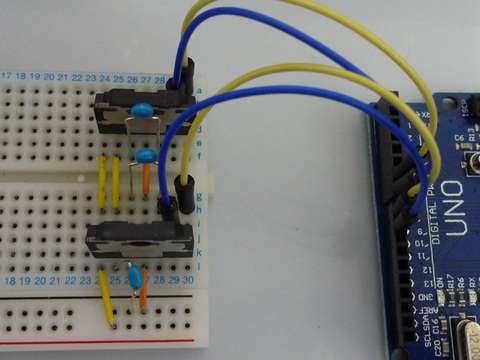
まずはモーター部分
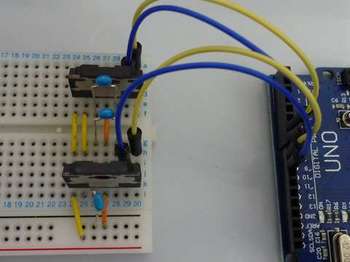
左右のキャタピラを別々に制御するのでドライバICを2つ以下で使用します。
ポイントは両ドライバICでVcc,GND部分など電源に関わる部分は
共通化してもまとめても問題ないのでお互いを接続しています。
[上段ドライバIC]
1,2番ピン:Arduinoの6,7番ピンと接続します
3,5番ピン:0.01pFのコンデンサで接続します
4,6,7番ピン:下段ドライバICの4,6,7番ピンと接続します
[下段ドライバIC]
1,2番ピン:Arduinoの8,9番ピンと接続します
3,5番ピン:0.01pFのコンデンサで接続します
4番ピン:ブレッドボードのGND部分と接続します(黒線の部分)
6番ピン:0.1pFでブレッドボードのGND部分と接続します
7番ピン:ブレッドボードのVcc部分と接続します(赤線の部分)
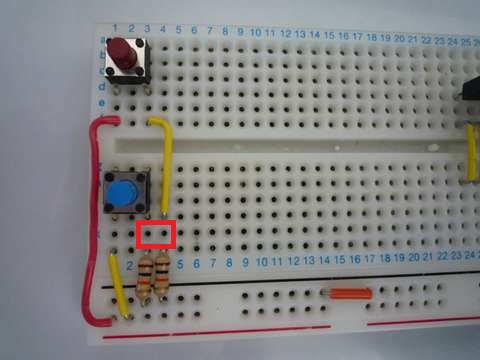
続けてスイッチ部分
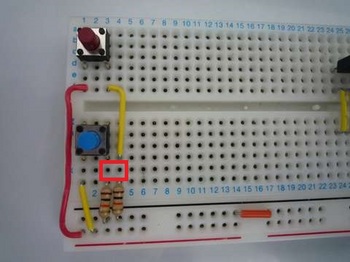
写真を参考にボタンをそれぞれVcc,GND(10KΩ経由)に接続します。
また写真の赤枠部分にArduinoのピンと接続します。
青ボタンをArduinoの4番ピン、赤ボタンを5番ピンにします。
今日はここまでです![[るんるん]](https://blog.ss-blog.jp/_images_e/146.gif) 次回は音声部分をやろうかな。
次回は音声部分をやろうかな。
試験終わった~受かるといいなぁ。
さて、更新を完全に怠っていましたが今日から再開です
今日からロボット作成として電子回路部分を作成していきます。
まず先に完成後の回路はこちら
普段は赤い線(Vcc)と黒い線(GND)の部分がブレッドボードの
上下それぞれにあったと思いますが、今回は写真の通り
VccとGNDが片方にしかないタイプを使用します。
また、Vccの部分ですが左と右でわかれているので、
異なる電圧を接続可能となっており、
今回はArduinoから左側に3.3V、右側に5.0Vを接続します。
補足として、a-fの部分が電気的に繋がっていてg-lの部分が繋がっています。
つまりa-fとg-l部分は繋がっていないので別のハードを並べられます。
いきなり全部は難しいので今回は
モーター部分とスイッチ部分からいきますね
まずはモーター部分
左右のキャタピラを別々に制御するのでドライバICを2つ以下で使用します。
ポイントは両ドライバICでVcc,GND部分など電源に関わる部分は
共通化してもまとめても問題ないのでお互いを接続しています。
[上段ドライバIC]
1,2番ピン:Arduinoの6,7番ピンと接続します
3,5番ピン:0.01pFのコンデンサで接続します
4,6,7番ピン:下段ドライバICの4,6,7番ピンと接続します
[下段ドライバIC]
1,2番ピン:Arduinoの8,9番ピンと接続します
3,5番ピン:0.01pFのコンデンサで接続します
4番ピン:ブレッドボードのGND部分と接続します(黒線の部分)
6番ピン:0.1pFでブレッドボードのGND部分と接続します
7番ピン:ブレッドボードのVcc部分と接続します(赤線の部分)
続けてスイッチ部分
写真を参考にボタンをそれぞれVcc,GND(10KΩ経由)に接続します。
また写真の赤枠部分にArduinoのピンと接続します。
青ボタンをArduinoの4番ピン、赤ボタンを5番ピンにします。
今日はここまでです
chihiro さん

-
nice! 11
記事 27
テーマ パソコン・インターネット
プロフィール
ブログを紹介する



コメント 0