- | 次の10件
Arduinoってなぁ~に?(IDE設定と動作確認) [Arduino準備編]
開発環境をインストール。ネットで「Arduino IDE」と検索すると簡単に...
ってArduinoって何か開発者が分裂して2系統になったみたい![[爆弾]](https://blog.ss-blog.jp/_images_e/154.gif)
IDEは1.6系と1.7系で、分裂したそれぞれがでているみたい…ややこしい![[あせあせ(飛び散る汗)]](https://blog.ss-blog.jp/_images_e/162.gif)
何か1.6系がwebでは人気っぽいですが、以下から1.7系をダウンロード
http://www.arduino.org/software
1)合意文章の確認 -> I Agree
2)インストールオプションの選択 -> Next
3)インストール先の選択 -> install
4)途中でドライバーのインストールが聞かれる -> インストール
でインストールして起動するとこんな感じ![[わーい(嬉しい顔)]](https://blog.ss-blog.jp/_images_e/140.gif)

画面左上のファイルを選択し、環境設定を選ぶとフォントなどが変更できます。
チェックリストにある「行の」を選択すると行番号が表示されます。
使い方ですが基本は以下の部分のボタンだけで基本はOK

1)チェックボタン:コンパイル
2)右矢印ボタン:コンパイルをArduinoへの書き込み
3)メモボタン:新規ファイル作成
4)上矢印ボタン:ファイルを開く
5)下矢印ボタン:ファイルを保存
6)ルーペボタン:シリアル端末を開く(Arduinoからprintfすると表示)
以下のようにツールメニューから初期設定を

1)ボード:Arduino unoを選択
2)ポート:COMxx (Arduino)などと表示されるところを選択
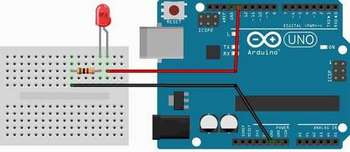
実際にサンプルソースを書いて動かして見ました。
2秒おきにLEDの点灯・消灯を繰り返しています。
では、次回からArduino入門編としてソースプログラムを書いていきます![[グッド(上向き矢印)]](https://blog.ss-blog.jp/_images_e/145.gif)
ってArduinoって何か開発者が分裂して2系統になったみたい
IDEは1.6系と1.7系で、分裂したそれぞれがでているみたい…ややこしい
何か1.6系がwebでは人気っぽいですが、以下から1.7系をダウンロード
http://www.arduino.org/software
1)合意文章の確認 -> I Agree
2)インストールオプションの選択 -> Next
3)インストール先の選択 -> install
4)途中でドライバーのインストールが聞かれる -> インストール
でインストールして起動するとこんな感じ

画面左上のファイルを選択し、環境設定を選ぶとフォントなどが変更できます。
チェックリストにある「行の」を選択すると行番号が表示されます。
使い方ですが基本は以下の部分のボタンだけで基本はOK

1)チェックボタン:コンパイル
2)右矢印ボタン:コンパイルをArduinoへの書き込み
3)メモボタン:新規ファイル作成
4)上矢印ボタン:ファイルを開く
5)下矢印ボタン:ファイルを保存
6)ルーペボタン:シリアル端末を開く(Arduinoからprintfすると表示)
以下のようにツールメニューから初期設定を

1)ボード:Arduino unoを選択
2)ポート:COMxx (Arduino)などと表示されるところを選択
実際にサンプルソースを書いて動かして見ました。
2秒おきにLEDの点灯・消灯を繰り返しています。
#define LED_PIN_NO 13
void setup() {
pinMode(LED_PIN_NO, OUTPUT);
}
void loop() {
digitalWrite(LED_PIN_NO, HIGH);
delay(2000);
digitalWrite(LED_PIN_NO, LOW);
delay(2000);
}
では、次回からArduino入門編としてソースプログラムを書いていきます
Arduinoってなぁ~に?(Arduinoの説明) [Arduino準備編]
おはようございます![[晴れ]](https://blog.ss-blog.jp/_images_e/1.gif) さずがに12月となると寒いですねぇ~
さずがに12月となると寒いですねぇ~![[台風]](https://blog.ss-blog.jp/_images_e/6.gif)
さてArduinoについて書いていきたいと思います。
Arduinoとはイタリアで開発されたマイコンボードで以下の特徴があります。
(1) 安い
実はマイコンボードの相場がよくわかっていないのです。。。
が、Arduinoは正規品でも3000円前後、互換機なら2000円未満で購入できます。
ロボット制作に限らず、お家で電子工作やマイコン制御を行う人にとって、
この値段はお手頃![[手(チョキ)]](https://blog.ss-blog.jp/_images_e/87.gif) だと思います。
だと思います。
(2) 開発言語もシンプル
ハードウェアを制御する場合、自分でプログラミングをする必要があります。
Arduinoのプログラミング言語はオリジナルですが実際はC++ベースで、
さらに言うとC言語の知識があればだいたいの事はできます
僕はC言語の経験のみでC++特有のクラスなどでの開発経験はありませんが、
普通にArduinoを使えています![[右斜め上]](https://blog.ss-blog.jp/_images_e/59.gif)
(3) 開発環境が無料でシンプル
安いにもつながりますがArduino IDEという開発環境が無料公開されています。
このIDEは非常にシンプルです。
初めて自分でソースを書いて、ファームウェアを書き込んで、とする人にとって
環境がシンプルで使いやすいことはとても大切だと思います。
(4) ハードウェアの制御が簡単にできる
Arduino一番の特徴はここかもしれません![[ひらめき]](https://blog.ss-blog.jp/_images_e/151.gif)
これからモーターやセンサーなどのハードウェアを制御していきますが、
この制御が簡単に行なえます。どれくらい簡単かと言うと、、、
ソースを3,4行書くだけでモーターの回転・停止が行えます。
これはArduinoがハードウェアの制御に必要な各処理を内部で実装しており、
Arduinoが提供しているライブラリをコールするだけという仕組みになっています。
長くなりましたが…特徴でした。
では実際に見ていきましょう...と言っても互換機です...安いんだもん![[たらーっ(汗)]](https://blog.ss-blog.jp/_images_e/163.gif)

説明ですが
1)写真中央下の黒い物体がマイコンで心臓部です
2)上の穴がデジタル端子でモーターなどと接続する部分です
3)下の穴がアナログ端子と5,3.3V電源端子です
アナログ端子はセンサーなどを接続する部分です
4)写真左上のボタンがリセットボダンで困ったときに押します
側面はこちら

ArduinoはUSB,DC電源(電池など)の両方から電源供給が可能となっており、
左上がUSB、左下がDCソケットです。
USB端子は電源の他にもPCから作成したファームウェアを書き込んだり、
メッセージの送受信を行ったりするのに使用します。
今回は説明ばっかりで全く面白くなかったですね
最初はどうしてもこうなるので許して下さい![[もうやだ~(悲しい顔)]](https://blog.ss-blog.jp/_images_e/143.gif)
次回はArduino IDEのインストールと使い方を説明しながら、
実際に動かしていきまぁーす
さてArduinoについて書いていきたいと思います。
Arduinoとはイタリアで開発されたマイコンボードで以下の特徴があります。
(1) 安い
実はマイコンボードの相場がよくわかっていないのです。。。
が、Arduinoは正規品でも3000円前後、互換機なら2000円未満で購入できます。
ロボット制作に限らず、お家で電子工作やマイコン制御を行う人にとって、
この値段はお手頃
(2) 開発言語もシンプル
ハードウェアを制御する場合、自分でプログラミングをする必要があります。
Arduinoのプログラミング言語はオリジナルですが実際はC++ベースで、
さらに言うとC言語の知識があればだいたいの事はできます
僕はC言語の経験のみでC++特有のクラスなどでの開発経験はありませんが、
普通にArduinoを使えています
(3) 開発環境が無料でシンプル
安いにもつながりますがArduino IDEという開発環境が無料公開されています。
このIDEは非常にシンプルです。
初めて自分でソースを書いて、ファームウェアを書き込んで、とする人にとって
環境がシンプルで使いやすいことはとても大切だと思います。
(4) ハードウェアの制御が簡単にできる
Arduino一番の特徴はここかもしれません
これからモーターやセンサーなどのハードウェアを制御していきますが、
この制御が簡単に行なえます。どれくらい簡単かと言うと、、、
ソースを3,4行書くだけでモーターの回転・停止が行えます。
これはArduinoがハードウェアの制御に必要な各処理を内部で実装しており、
Arduinoが提供しているライブラリをコールするだけという仕組みになっています。
長くなりましたが…特徴でした。
では実際に見ていきましょう...と言っても互換機です...安いんだもん

説明ですが
1)写真中央下の黒い物体がマイコンで心臓部です
2)上の穴がデジタル端子でモーターなどと接続する部分です
3)下の穴がアナログ端子と5,3.3V電源端子です
アナログ端子はセンサーなどを接続する部分です
4)写真左上のボタンがリセットボダンで困ったときに押します
側面はこちら

ArduinoはUSB,DC電源(電池など)の両方から電源供給が可能となっており、
左上がUSB、左下がDCソケットです。
USB端子は電源の他にもPCから作成したファームウェアを書き込んだり、
メッセージの送受信を行ったりするのに使用します。
今回は説明ばっかりで全く面白くなかったですね
最初はどうしてもこうなるので許して下さい
次回はArduino IDEのインストールと使い方を説明しながら、
実際に動かしていきまぁーす
Arduinoってなぁ~に?(マイコンとは) [Arduino準備編]
Arduinoについて記事を書こうとしたら、1回じゃ難しくわけて書いています。
まずはマイコン、マイコンボードについてです。
マイコンって単語、聞いたことありますかぁ?
正式名称はマイクロコントローラです。写真はこちら

まずコンピュータには主に「CPU、メモリ、入出力I/F、タイマー」が必要です。
1)CPU :演算や機器制御を行うコンピュータの心臓部
2)メモリ :プログラムやデータを格納しておく保管庫
3)入出力I/F:キーボードやセンサーなど外部機器との出入り口
4)タイマー:コンピューターが安定動作させる時計
マイクロコントローラは上記の機能をコンパクト化し、1つに集約したものです。
凄いもののように感じますが実際は1個百円で買えたりする安価なものです。
マイコンですが実は冷蔵庫や炊飯器など家電製品にはほぼ100%使用されています。
ただし普通のPCとは違ってマイコンはCPU・メモリなどのスペックが低く、
入出力I/Fも汎用性をなくし、その製品に特化したものになっています。
例としてマイコンの場合、PCやスマホでは当たり前のモニタに綺麗な画面を表示して
マウスでアプリを起動させるような機能はありません。
冷蔵庫や炊飯器に画面は必要ありませんからね
まとめるとマイコンは特定の製品・ハードウェアを制御するために、
機能を必要最低限に絞った安価なコンピューターになります。
ロボットを制作する場合も画面・マウス・キーボードは不要となり、
センサーなどのハードウェアを制御するのみなのでマイコンを使用します。
ただし、マイコンですが写真にあったように黒い謎の物体です。
どうやってモーターを繋ぐの?って感じですよね。
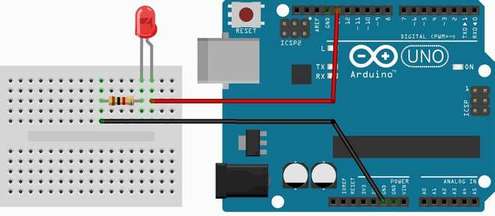
そこで登場するのがマイコンボードです。写真はこちら。
マイコンボードは基盤の上にマイコン、入出力I/F、メモリなど必要な物をまとめたものになります。写真の上下に見える穴の空いた部分が実際にセンサーやモーターを接続する端子部分になります。
つまりマイコンボードを使用すれば簡単にマイコンを使用して
各種ハードウェアが制御できるようになります。
そう、このマイコンボードこそがArduinoになります。
長くなりましたが今回はここまで次回はArduinoの紹介でーす
まずはマイコン、マイコンボードについてです。
マイコンって単語、聞いたことありますかぁ?
正式名称はマイクロコントローラです。写真はこちら

まずコンピュータには主に「CPU、メモリ、入出力I/F、タイマー」が必要です。
1)CPU :演算や機器制御を行うコンピュータの心臓部
2)メモリ :プログラムやデータを格納しておく保管庫
3)入出力I/F:キーボードやセンサーなど外部機器との出入り口
4)タイマー:コンピューターが安定動作させる時計
マイクロコントローラは上記の機能をコンパクト化し、1つに集約したものです。
凄いもののように感じますが実際は1個百円で買えたりする安価なものです。
マイコンですが実は冷蔵庫や炊飯器など家電製品にはほぼ100%使用されています。
ただし普通のPCとは違ってマイコンはCPU・メモリなどのスペックが低く、
入出力I/Fも汎用性をなくし、その製品に特化したものになっています。
例としてマイコンの場合、PCやスマホでは当たり前のモニタに綺麗な画面を表示して
マウスでアプリを起動させるような機能はありません。
冷蔵庫や炊飯器に画面は必要ありませんからね
まとめるとマイコンは特定の製品・ハードウェアを制御するために、
機能を必要最低限に絞った安価なコンピューターになります。
ロボットを制作する場合も画面・マウス・キーボードは不要となり、
センサーなどのハードウェアを制御するのみなのでマイコンを使用します。
ただし、マイコンですが写真にあったように黒い謎の物体です。
どうやってモーターを繋ぐの?って感じですよね。
そこで登場するのがマイコンボードです。写真はこちら。
マイコンボードは基盤の上にマイコン、入出力I/F、メモリなど必要な物をまとめたものになります。写真の上下に見える穴の空いた部分が実際にセンサーやモーターを接続する端子部分になります。
つまりマイコンボードを使用すれば簡単にマイコンを使用して
各種ハードウェアが制御できるようになります。
そう、このマイコンボードこそがArduinoになります。
長くなりましたが今回はここまで
足回り作成2 (1-3.ロボット制作) [ロボット制作(tankun-mk1)]
はい、連チャンで~す![[exclamation×2]](https://blog.ss-blog.jp/_images_e/160.gif)
ちょっと会社に行く時間が迫って来た…急がねば。
次はモーターです。TAMIYAさんのダブルギアボックス。

これの凄いところは
1)モーターが2つなので左右それぞれに制御できる
2)ギアの組み合わせでトルク速度・トルクが4段階に変更可能
1)ですがロボットを旋回させる場合には必須となります。右に移動する場合は「左のキャタピラを前進」「右を後退」みたいな。
2)に関してはモーターギアの仕組みとして速度を早くするとトルク(パワー)が落ちて、速度を遅くするとパワーが上がるといった感じです。速度を早くし過ぎると制御が難しくなるので今回は、一番低速でハイパワーの344.2:1で行きます。
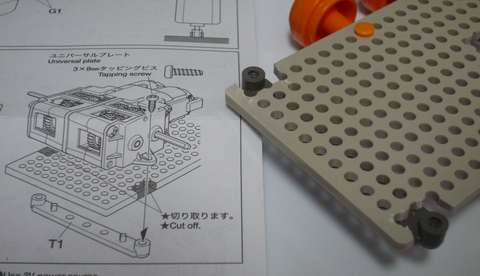
作りました~(作り方は説明書を見てね)

手前の謎の棒ですが、本体とモーターを固定するために使用します。こんな感じ![[目]](https://blog.ss-blog.jp/_images_e/84.gif)

そしてモーターを本体に取り付けて、キャタピラを装着したのがこちら

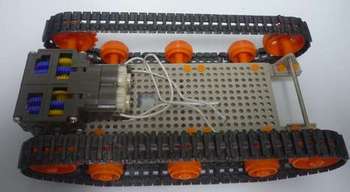
なんか動きそうな雰囲気がでてきましたねこれで足回りは一旦、完成です。
次回からはArduinoを使用した電子工作部分をやっていきたいと思いま~す。
では家族を起こして、子供を保育所に送って、会社に行ってきま~す
皆さんもいい一日を~![[手(パー)]](https://blog.ss-blog.jp/_images_e/88.gif)
ちょっと会社に行く時間が迫って来た…急がねば。
次はモーターです。TAMIYAさんのダブルギアボックス。

これの凄いところは
1)モーターが2つなので左右それぞれに制御できる
2)ギアの組み合わせでトルク速度・トルクが4段階に変更可能
1)ですがロボットを旋回させる場合には必須となります。右に移動する場合は「左のキャタピラを前進」「右を後退」みたいな。
2)に関してはモーターギアの仕組みとして速度を早くするとトルク(パワー)が落ちて、速度を遅くするとパワーが上がるといった感じです。速度を早くし過ぎると制御が難しくなるので今回は、一番低速でハイパワーの344.2:1で行きます。
作りました~(作り方は説明書を見てね)

手前の謎の棒ですが、本体とモーターを固定するために使用します。こんな感じ
そしてモーターを本体に取り付けて、キャタピラを装着したのがこちら

なんか動きそうな雰囲気がでてきましたねこれで足回りは一旦、完成です。
次回からはArduinoを使用した電子工作部分をやっていきたいと思いま~す。
では家族を起こして、子供を保育所に送って、会社に行ってきま~す
皆さんもいい一日を~
足回り作成1 (1-2.ロボット制作) [ロボット制作(tankun-mk1)]
遅くなりましたぁー![[どんっ(衝撃)]](https://blog.ss-blog.jp/_images_e/161.gif)
Chihiroは超朝活人間で9:30に寝て、4:30頃に起きています。。。お爺ちゃん
色々と届いたので順番に制作していきたいと思います。
まずは足回り土台をベースにキャタピラ・モーター部分を作っていきます。
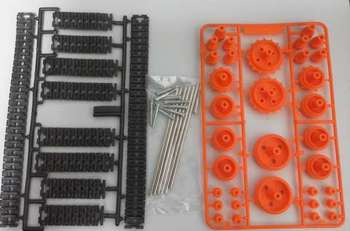
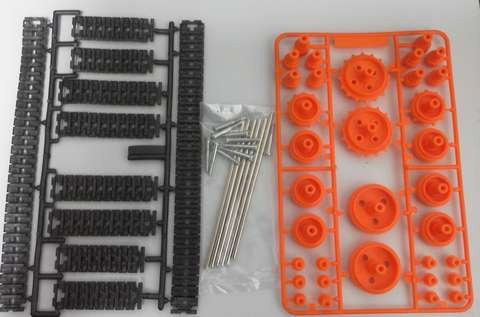
届いた商品がこちら。TAMIYAさんのキャタピラとユニバーサルプレートです。

キャタピラの中身はこんな感じ。車輪は大小さまざまな物がはいっています。
キャタピラも長さが大・中・小とあって、つなげることで色んな長さが作れます。
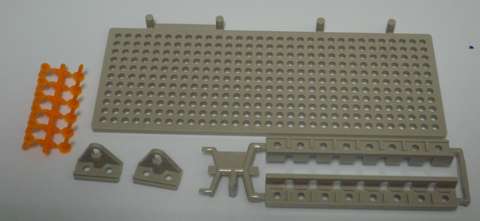
ユニバーサルプレートは長方形型の板で、中には等間隔の穴が開いています。
そして車輌をつけるための専用パーツがいくつか付属しています。

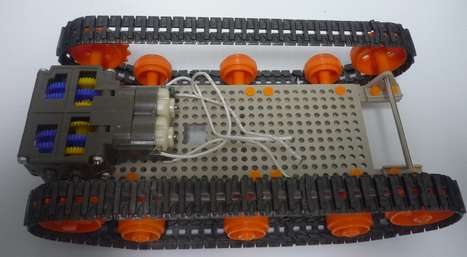
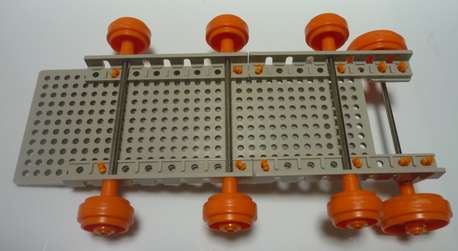
今回の制作結果がこちら
ユニバーサルプレートにキャタピラの車輪を装着させました。
各パーツをつなげているオレンジ色の物体は付属していてる
プッシュピンというパーツです。


小さな車輪を支えている長細いパーツはユニバーサルプレートの先頭から6個目の穴が先頭になるよう1本目をつけ、繋げる形で2本目を装着してください。
そうすると2本目は3個ほど穴が先頭からはみ出てると思うので、
そこに写真のように車輪をとりつければ完成です
今回はここまで~
次回はモーターを作って、キャタピラを装着させたいと思います。
Chihiroは超朝活人間で9:30に寝て、4:30頃に起きています。。。お爺ちゃん
色々と届いたので順番に制作していきたいと思います。
まずは足回り
届いた商品がこちら。TAMIYAさんのキャタピラとユニバーサルプレートです。

キャタピラの中身はこんな感じ。車輪は大小さまざまな物がはいっています。
キャタピラも長さが大・中・小とあって、つなげることで色んな長さが作れます。
ユニバーサルプレートは長方形型の板で、中には等間隔の穴が開いています。
そして車輌をつけるための専用パーツがいくつか付属しています。
今回の制作結果がこちら
ユニバーサルプレートにキャタピラの車輪を装着させました。
各パーツをつなげているオレンジ色の物体は付属していてる
プッシュピンというパーツです。

小さな車輪を支えている長細いパーツはユニバーサルプレートの先頭から6個目の穴が先頭になるよう1本目をつけ、繋げる形で2本目を装着してください。
そうすると2本目は3個ほど穴が先頭からはみ出てると思うので、
そこに写真のように車輪をとりつければ完成です
今回はここまで~
次回はモーターを作って、キャタピラを装着させたいと思います。
まずはお買い物編 (1-1.ロボット制作) [ロボット制作(tankun-mk1)]
それではロボット制作…の前にまずは必要な部品を購入したいと思います。
まず作るロボットですがtankun-mk1として以下の仕様としたいと思います。
1) キャタピラ式:いきなり2足歩行などの足は難しいので、まずはキャタピラから
2) 自走ロボット:壁などの障害物を検知して、止まって自動で行き先を探します
3) 喋ります :なくてもいいんです…でも喋った方が素敵じゃないですか![[るんるん]](https://blog.ss-blog.jp/_images_e/146.gif)
4) 安く仕上げる:今回は7500円以内での完成を目指します
お買い物は全て通販でAmazonさんと秋月電子さんを使い分けていきます。
理由は物が揃っていて、安いこと!!
僕は田舎に住んでいるのでこれだけを一気に変える場所がないんですよそして見つけたとしても、こんなに安くは買えませんからねぇ。
Amazonで以下を購入
1) TAMIYA キャタピラ(468円)
2) TAMIYA ユニバーサルプレート(648円)
3) TAMIYA ツインモーター(654円)
4) テスター(420円) ... 買わなくてもいいです
5) Arduino本体(1850円)
合計:4040円
次に秋月電子さんで以下を購入しました~
1)音声合成LSI ATP3011M6-PU(850円
2)オーディオアンプ NJM386BD(100円
3)コンデンサ各種(200円前後
4)抵抗各種(300円前後
5)モータドライバIC TA7267BP(300円
6)電池ボックス(単3*4本) (060円
7)スピーカー(100円
8)タクトスイッチ(水色、赤色)(020円
9)ブレッドボード(270円
10)ジャンパーコード(オス-オス)(220円
11)ジャンパーコード(オス-メス)(330円
12)ジャンパーワイヤー(400円)
13) バッテリースナップ(20円)
14)単9電池(100円)
15)単3電池4本(80円)
合計 3350円
加えて100円均一で以下を買います
1)ニッパー
2)両面テープ
3)マジックテープ
4)ドライバーセット
合計 432円
あれ少しオーバーしている![[がく~(落胆した顔)]](https://blog.ss-blog.jp/_images_e/142.gif)
まぁテスターはなくても作れる事を考えてOKとしましょう
商品詳細は物が届いたら順番に写真付きで紹介しまーす![[猫]](https://blog.ss-blog.jp/_images_e/101.gif)
そして申し訳ありませんが作っているうちに必要な物がでてくると
購入リストは適宜更新します。。。
まず作るロボットですがtankun-mk1として以下の仕様としたいと思います。
1) キャタピラ式:いきなり2足歩行などの足は難しいので、まずはキャタピラから
2) 自走ロボット:壁などの障害物を検知して、止まって自動で行き先を探します
3) 喋ります :なくてもいいんです…でも喋った方が素敵じゃないですか
4) 安く仕上げる:今回は7500円以内での完成を目指します
お買い物は全て通販でAmazonさんと秋月電子さんを使い分けていきます。
理由は物が揃っていて、安いこと!!
僕は田舎に住んでいるのでこれだけを一気に変える場所がないんですよ
Amazonで以下を購入
1) TAMIYA キャタピラ(468円)
2) TAMIYA ユニバーサルプレート(648円)
3) TAMIYA ツインモーター(654円)
4) テスター(420円) ... 買わなくてもいいです
5) Arduino本体(1850円)
合計:4040円
次に秋月電子さんで以下を購入しました~
1)音声合成LSI ATP3011M6-PU(850円
2)オーディオアンプ NJM386BD(100円
3)コンデンサ各種(200円前後
4)抵抗各種(300円前後
5)モータドライバIC TA7267BP(300円
6)電池ボックス(単3*4本) (060円
7)スピーカー(100円
8)タクトスイッチ(水色、赤色)(020円
9)ブレッドボード(270円
10)ジャンパーコード(オス-オス)(220円
11)ジャンパーコード(オス-メス)(330円
12)ジャンパーワイヤー(400円)
13) バッテリースナップ(20円)
14)単9電池(100円)
15)単3電池4本(80円)
合計 3350円
加えて100円均一で以下を買います
1)ニッパー
2)両面テープ
3)マジックテープ
4)ドライバーセット
合計 432円
あれ少しオーバーしている
まぁテスターはなくても作れる事を考えてOKとしましょう
商品詳細は物が届いたら順番に写真付きで紹介しまーす
そして申し訳ありませんが作っているうちに必要な物がでてくると
購入リストは適宜更新します。。。
やべぇ、始めちまったよ
こんにちは、chihiroです。
やべぇ、本当に始めちまったよ、ブログ…
何をビビってるの![[exclamation&question]](https://blog.ss-blog.jp/_images_e/159.gif) って感じかもしれませんが、、、いや、まさか自分がやるとはねぇかなり内向的な性格なので絶対にやらないと思っていました。
って感じかもしれませんが、、、いや、まさか自分がやるとはねぇかなり内向的な性格なので絶対にやらないと思っていました。
初回なので少し現在の制作状況を、、、こちらがtankun-mk3です

配線はこんな感じ…グチャグチャですね。

マイコンは流行りのArduinoを使用していて、何気に動いて喋ります
そして何とか8cmの段差まで登れます。10cmの壁が超えられない
32歳の中年SEが、この歳になって初めて挑むロボット制作の過程を適当に紹介していきたいと思いますロボット制作と言いながら超初心者なので、まずは電子工作の基礎の基礎から勉強して、その結果を記録していきたいと思います。
あっ、そう言いながら定期的にガンプラや好きな音楽の曲紹介もしていきます
最近は米津玄師さんの「恋と病熱」が頭からはなれない。
やべぇ、本当に始めちまったよ、ブログ…
何をビビってるの
初回なので少し現在の制作状況を、、、こちらがtankun-mk3です

配線はこんな感じ…グチャグチャですね。

マイコンは流行りのArduinoを使用していて、何気に動いて喋ります
そして何とか8cmの段差まで登れます。10cmの壁が超えられない
32歳の中年SEが、この歳になって初めて挑むロボット制作の過程を適当に紹介していきたいと思います
あっ、そう言いながら定期的にガンプラや好きな音楽の曲紹介もしていきます
最近は米津玄師さんの「恋と病熱」が頭からはなれない。
- | 次の10件
chihiro さん

-
nice! 11
記事 27
テーマ パソコン・インターネット
プロフィール
ブログを紹介する


